WebAssembly is a low-level language for a portable virtual machine. Wasm is designed to be a compilation target for a variety of programming languages and its design is hardware independent and relatively simple, making its support ubiquitous in modern browsers. Its simple design made it a perfect first candidate for a first emulator of an conventional computational system on a novel functional computer: Urbit. In this paper I discuss the current state of the urwasm project and some technical details, as well as describe the strategy to jet the interpreter of a state machine in a functional environment.
… Martian code is so perfect that it cannot be contaminated, even in this sticky environment. The general structure of cross-planet computation is that Earth always calls Mars; Mars never calls Earth. The latter would be quite impossible, since Earth code is non-Maxwellian. There is only one way for a Maxwellian computer to run non-Maxwellian code: in a Maxwellian emulator. Any direct invocation is an implementation error by definition. Thus, Mars remains completely pure and Martian, even while glued firmly to Earth. ( ~sorreg-namtyv, 2010)
The Urbit computer is specified as a Nock interpreter and a
storage of an event log, represented as a list of nouns (
~sorreg-namtyv et al., 2016). Nock is a Lisp-like typeless
functional language with a tiny specification ( ~sorreg-namtyv,
2013), which defines a function nock(sub, fol), where
subject sub and formula fol are both nouns: binary trees of
unsigned integers with an arbitrary length, or “S-expressions
without an S”. The state of the Urbit computer is thus defined
as nock(epic, [2 [0 3] [0 2]]), where epic is the
event log.
This environment may seem quite limiting at first glance, but by feeding proper events to this computer (via the Hoon-to-Nock compiler, the Arvo OS written in Hoon, etc.) we can create a personal server used by thousands of people today, which can host Web applications and communicate with other Urbit computers.
If we desire to run conventional (“Earth”) programs on Urbit, we would have to build an interpreter in Nock that would evaluate the imported code within Urbit. WebAssembly (Wasm) is an excellent candidate language for having an interpreter in Nock:
For these reasons, we set out to build a Wasm interpreter native to Urbit (Quodss/urwasm). As of writing, the project consists of the following components:
This article first describes the implementation of the
interpreter in urwasm. It then lays out a strategy for
efficiently jetting the interpreter. It closes by discussing the
need for an interpreter of Language for Invocation of Assembly
(Lia) to encapsulate the Wasm interpreter. A sketch of the
specification of Lia language and ++lia interpreter is
provided.
The strategy for interpreting Wasm expressions was to model each instruction as a function
where local-state is a noun which describes the state of
the interpreter at any point during the computation:
stack and local values, linear memory, and so forth. An
expression is a list of instructions, and can be modeled as a
composition of all instructions in the list, which also makes it
a function from local-state to local-state. Most of the Wasm
instructions were implemented as Hoon gates with that type,
while five instructions (call, call_indirect, block,
loop, and eval) were treated directly in the evaluation
loop.
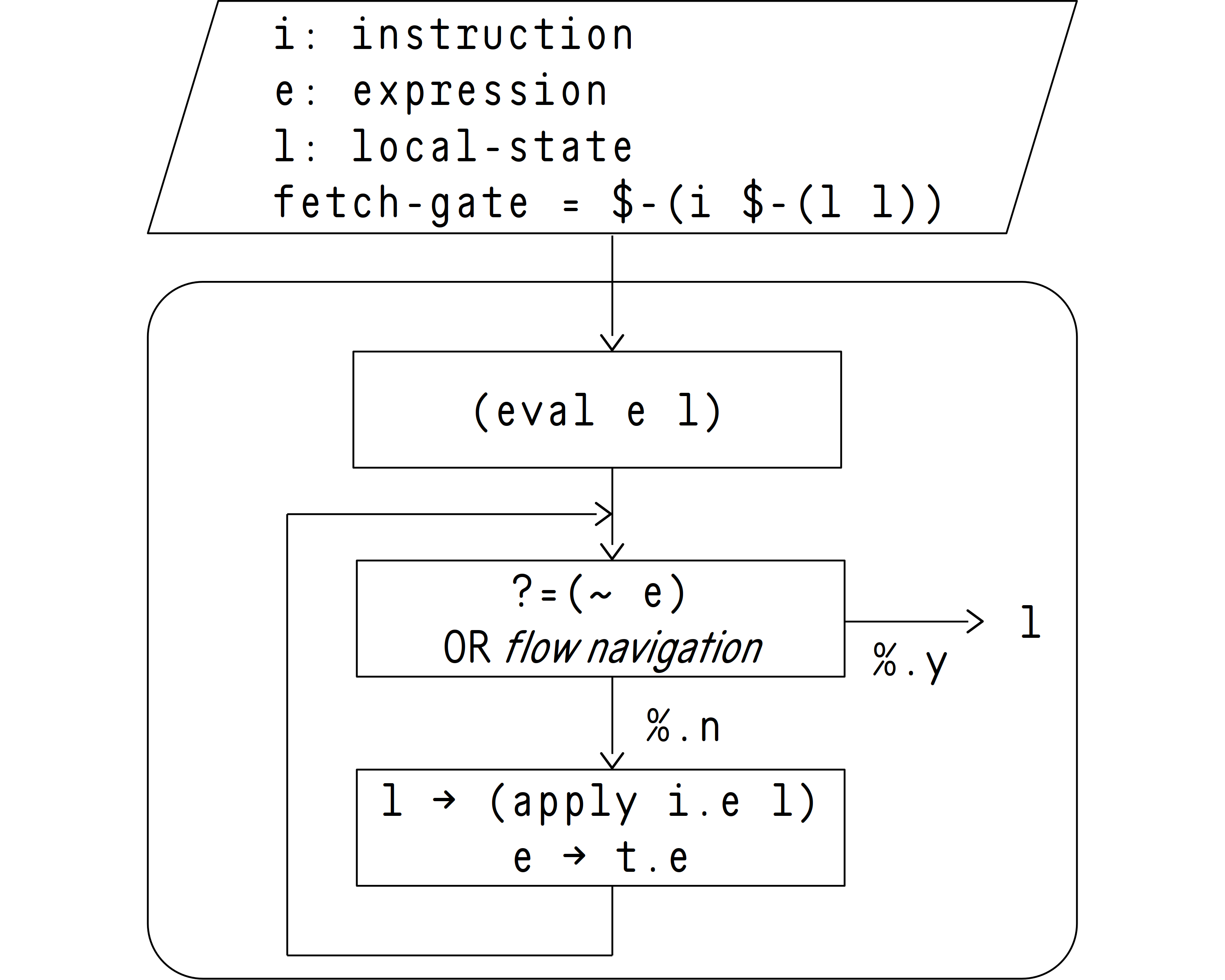
The evaluation loop consists mainly of two functions:
++eval and ++apply. ++eval takes an expression and a
local-state to produce a local-state. It pops an
instruction from the expression and applies it to the local
state with ++apply, stopping if it reaches the end of the list
or if an instruction triggered execution flow navigation. For
example, the return instruction causes ++eval to stop
applying the rest of the instructions and return the local state
as is, with the branching coordinate contained in the local
state.
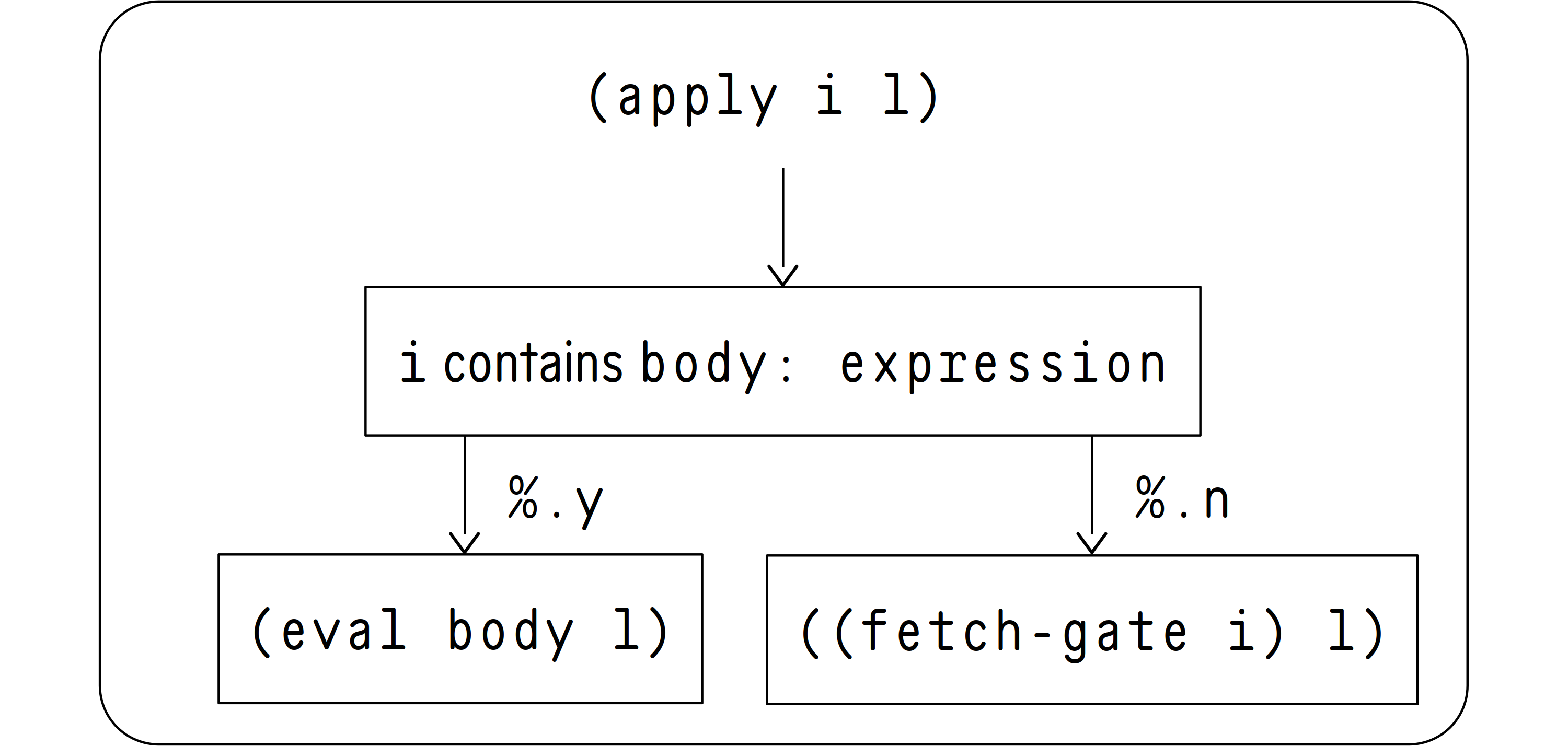
The ++apply gate takes an instruction and local-state,
returning local-state. While for most instructions it finds
an appropriate gate $-(local-state local-state) and
applies it to the given local state, in the case of the five
instructions listed above it instead calls ++eval on the body
of those instructions. Thus stack frames are divided not with a
label value, as in the formal specification of Wasm, but with
the depth of mutual recursion of ++eval (Figure 1a ) and
++apply (Figure 1b ).
The gates above are internal; the outside caller will typically
interact via two other gates, ++prep and ++invoke. ++prep
instantiates the module: it loads the data segments into the
linear memory, instantiates global values, and runs a start
function if specified. The product of this gate is either
global-state, which describes the state of the Wasm
module in between function invocations, or a block on an
unresolved import, or a crash or “trap” in WebAssembly
terms.
++invoke takes a name of an exported function, input
values with type annotation and global-state. It
performs a typecheck on the supplied values and calls
an appropriate function. The result (as with ++prep)
either succeeds with output values and updated state, or
blocks/traps.
The state of an Urbit computer, as already mentioned above, is a pure function of its stream of events with the lifecycle function defined in Nock. No information other than the event log may impact the computation of this state, including the hardware on which the interpreter runs or the implementation details of the interpreter. For a Wasm interpreter in Nock to be practical it needs to be paired with some fast implementation of the Wasm interpreter in another language, and the equivalence of both algorithms must to be confirmed. In this way, the Urbit computer can be a practical personal server without violating its simple definition: the code of functions in Nock must be sufficient for an Urbit programmer to reason about the system.
This demand of equivalence, however, poses some difficulties.
Some instructions of Wasm are defined non-deterministically.
For example, the memory.grow instruction can return -1 and
not increase the length of the linear memory even if the
maximum size of the memory described in the module file is
not exceeded. The choice is left to the embedder, which can
opt to keep the size of the memory buffer based on its
resources.
In addition, some numerical operators return a set
of values; that is, a Wasm VM could return any value
from that set. This typically happens with floating-point
operators when they are given a NaN value, with the set
being defined by the value being a canonical NaN or
not.1
Some numerical operators return an empty set of values. In
other words, their behaviour is set to be undefined for certain
inputs, and those operators are described as partial. This can
happen, for example, with the idiv_N operator when the
second operand is equal to zero. The behaviour of Wasm VM
is undefined in this case.
Therefore, the Wasm interpreter in urwasm describes
a deterministic Wasm machine, limited to a subset of
behaviors:
++mink;
/lib/op-def for more information.)
memory.grow and similar instructions always
attempt to grow the buffer when the limits in the
module file permit.Some simple programs are included in the test suite. Most of them involve only numerical operations, while one of them calls a Wasm program compiled from Rust source which flips the order of characters in the string. Evaluation of this function requires multiple Wasm function invocations in order to e.g. allocate memory for the input string, and interaction with the global-state to read from and write to linear memory.
When Rust source is compiled, the compiler produces JavaScript code which takes care of low-level handling of the state of Wasm runtime. In the case of Wasm interpreter in Hoon, JS code was manually translated to Hoon.
In addition, some other programs were run successfully.
WebAssembly text format parsing in urwasm is implemented
by composing the wat2wasm parser from the wat Rust crate
with a binary parser in Hoon. Another example was presented
at the Urbit Assembly in October 2023: an algorithm
to simplify debts between a group of people, using the
FlowGraph Dinic algorithm for maximum flow computation
from the contest_algorithms Rust crate ( ~dozreg-toplud
et al., 2023).
These cited examples highlight the incredible inefficiency of the interpreter: it takes about a second to flip a string with 27 characters, and about a minute to parse a small Wasm binary with compiled wat2wasm. While there is most likely room for improvement, the Hoon code serves first and foremost as a formal specification of a deterministic Wasm VM, translated from the mix of pseudocode and mathematical formulas to a tightly-specified language. This specification would then serve for the verification of jet correctness.
To jet the interpreter, the gate written in Hoon must be paired with a code in C that must be extensionally equivalent to the Hoon code. In that sense function definition in Hoon would act as a formal mathematical specification of what the interpreter returns, while C code would act as the actual implementation of Wasm runtime by arriving to the same conclusion as Hoon code but faster. The purpose of the Hoon specification is then to provide a test bed for verifying correctness of the interpreter, either by testing or formal analysis of both programs via e.g. the K verification framework (cf. runtimeverification/ knock, ~bithex-topnym (2023)).
Since Wasm is a portable language for a state machine, each invocation of a function from a Wasm module would either return a successful result with returned values and an updated state, or some flavor of failure (trap or blocking on unresolved external request, e.g. function call of an imported function). This gives us several possible strategies for jetting:
++invoke gate at all. Instead, have
a higher level function that executes a series of
operations on a module and doesn’t return the
entirety of Wasm module state. Hoon specification
of this function would use the Wasm interpreter in
Hoon, and the jetting code in C would use Wasm
runtime in C.But first, why do we have to have access to the state in the first place?
use wasm_bindgen::prelude::*; #[wasm_bindgen] pub fn process(input: String) -> String { 5 let output_string: String = input.chars().rev().collect(); output_string }
Even for a simple source code the generated Wasm code
might require multiple function invocations to get a desired
result. Consider a Rust function that flips the characters in a
given string (Listing 1 ). After compiling this function to
Wasm, you would get a module with five exported functions:
process itself, add_to_stack_pointer, malloc,
realloc and free. The call of the compiled function in JS
would look like:
export function process(input) { let deferred2_0; let deferred2_1; try { 5 const retptr = wasm.__wbindgen_add_to_stack_pointer(-16); const ptr0 = passStringToWasm0(input, wasm.__wbindgen_malloc, wasm.__wbindgen_realloc); const len0 = WASM_VECTOR_LEN; wasm.process(retptr, ptr0, len0); var r0 = getInt32Memory0()[retptr / 4 + 0]; 10 var r1 = getInt32Memory0()[retptr / 4 + 1]; deferred2_0 = r0; deferred2_1 = r1; return getStringFromWasm0(r0, r1); } finally { 15 wasm.__wbindgen_add_to_stack_pointer(16); wasm.__wbindgen_free(deferred2_0, deferred2_1, 1); } }
Multiple invocations are necessary, some with the arguments received from outputs of other invoked functions. Having the access to the state of the module is thus crucial for any practical interpreter. In addition, we may have to read data from the state and save it as a noun, in order to perform I/O on that piece of information, since Arvo may only send effects when the computation of a given event has finalized. While jets could in theory perform system calls during their evaluation, doing so is considered a gross violation of jetting mechanism: jets as functions are supposed to be as pure as possible, to imitate their Nock definitions.
Let us review our options.
Maybe this is the perfect option in the long term, but this option is unfeasible in the short to medium term due to the required development time. In addition, it would require speculative kinds of optimizations added to a Nock interpreter that do not yet exist, such as “data jets”, when a noun is represented in a way that allows certain operations faster to be performed faster. (For example, the Nock runtime could have a list of bytes (list @D) represented as a byte array in its memory, with some jetted functions configured to operate on that kind of nouns more efficiently.)
The next solution is to add serializer and deserializer functions
to the jet of the ++invoke arm, which would convert
the noun representation of the state of the module to a
representation legible to the jetting interpreter before
evaluating the invoked function, and convert it back into a
noun when the computation is finished. However, having to
translate the state between two models twice for each
function invocation would impose a lot of computational
overhead.
A less obvious variation is to put the de/serializer in the Hoon
code of ++invoke, and have the jetted gate take and
return module state in the same representation as in the
Wasm interpreter in C. The jet would then operate on
the given state directly, without having to translate the
state of the interpreter. Here the problem is that the
implementation strategy leaks into the formal specification,
making Hoon code jet-dependent. Replacement of the jetting
Wasm runtime, including in the case of switching from
Vere to Ares, would make us have to change the Hoon
code, which I find to be antithetical to the Urbit project
itself.
In addition, current model of jetting in both Vere and Ares requires that the core produced by the jetted arm is left read-only, without modification, so the output of the jet function cannot overwrite the core’s sample. That would require the interpreter to copy the entire state of the module and operate on that, which creates prohibitive overhead for memory-heavy computations, like running a Linux VM.
This strategy would involve writing a function that takes a Wasm module, a list of operations to be performed and some other parameters, and then jetting this function. No intermediate state would be returned, saving us from having to convert it between different representations. However, a practical jet implementation would have to cache the intermediate state of the interpreter between Arvo events, otherwise it would have to reevaluate the operations each time the jetted function encounters a block on an unresolved import, or if the caller appended new operations to the list to interact with the module.
Let’s return to our example with string flipping in Rust. How would our hypothetical higher-level function run the program? Ignoring imports for now, consider this gate:
++ lia |= [module=octs actions=(list action)] ^- $% [%0 out=(list value)] [%2 ~] 5 == :: (...)
This gate accepts a binary file of a Wasm module and a list of actions to be performed, and returns either a list of values in the event of successful resolution, or an error. A value here is either a WebAssembly numerical value or a slice of the linear memory called octs in homage to Hoon. To flip a string, we would pass it the module file obtained from the Rust compiler and a list of actions obtained from parsing this code (ignoring realloc for simplicity), as shown in Listing 3 .
# Lia (Language for Invocation of Assembly) scripting # language # "add_to_stack_pointer", "malloc" and "process" # are functions exported by the wasm module from Rust 5# example above # string0 = "Hello world".to_octs retptr = __wbindgen_add_to_stack_pointer(-16) ptr0 = __wbindgen_malloc(string0.len, 1) 10memory.write(string0, ptr0) process(retptr, ptr0, len0) i32 r0 = memory.read(retptr, 4) i32 r1 = memory.read(retptr+4, 4) return memory.read(r0, r1)
This code is written in Language for Invocation of Assembly (Lia for short). We imagine this language to have a very small specification: its only purpose is to describe sequences of actions to be performed with a Wasm module. These include function invocation and memory reads and writes, as well as variable declarations, for loops and conditionals for expressivity.
Listing 3 above is essentially identical to the JS example in Listing 2 . Ideally, Lia will be generated by the compiler itself, just like the JS code was also generated, with placeholders for input values, where the caller could insert their parameters.
A jet of ++lia would have to perform the same operations
but with an interpreter in C. However, considering the tiny
specification for Lia, we do not foresee implementing
the algorithm identically in both Hoon and C to be a
challenge.
The Lia interpreter as described has been non-interactive; it takes a module and a list of actions and returns a result. But the WebAssembly module can and should be interactive: we want to invoke a function, perform some I/O based on the result, then invoke a function again etc. In addition, the module might contain imported functions, which we wish to resolve to provide I/O to the Wasm program.
Interacting with an instantiated module in the case of
++invoke jetting is straightforward: the state of the module
is a noun, and to interact with the state we would call various
jetted gates that invoke functions and perform I/O on the
store. Handling import function calls is also straightforward:
++invoke might return a blocked result with the name
of the imported function, which is then resolved in the
embedding context, modifying state of the module if
necessary. How would the same be achieved in a stateless
fashion?
++ lia |= $: module=octs actions=(list action) shop=(list (list value)) 5 ext-func=(map (pair cord cord) (list action)) diff=(each (list action) (list value)) == ^- $% [%0 out=(list value)] [%1 name=path args=(list value)] 10 [%2 ~] == => ?: ?=(%.y -.diff) .(actions (weld actions p.diff)) 15 .(shop (snoc shop p.diff)) :: (...)
In Listing 4 , we have added details to the block or trap.
Now the interpreter can return a block with %1, asking for an
external reference to be resolved and the result of the
resolution to be appended to shop. The interpreter now
takes a list of list of values shop, which represents the
resolved Lia imports; ext-func, which provides definitions
for imported functions for a given Wasm module; and
diff, whose contents are appended to an appropriate
field.
Notice the difference between imports in Lia and in Wasm:
the namespace of the latter is defined with a pair of strings in
compliance with the formal specification, and the input
parameters of ++lia contain definitions of the imported
functions for the Wasm module. Lia imports, on the other
hand, are bound to a path namespace and are external to
++lia.
In a trivial case the list of actions of a function definition
in ext-func would contain a single call to a function
which is external to Lia and is named with path, not
(pair cord cord) like Wasm import functions. In a
nontrivial case the list of actions could contain multiple
actions to be performed, e.g. a memory read followed by
calling a Lia import function which takes octs. The purpose
here is for the import calls to be able to surface not only
Wasm values but Lia values like octs, giving us the richness
of import calls that we could have with ++invoke jetting
model without exposing the entirety of the module’s
state.
Since Wasm execution is deterministic, then the state of a
module, whether in Nock or in the jetting environment, is
referentially transparent with regards to the input parameters
of Lia. Here diff appears to be semantically useless, since
instead of placing changes there we could have placed them
directly into a proper field of the sample.
But diff is necessary for efficient computations:
each time ++lia jet computes something with a Wasm
runtime, it will save a cache of Lia interpreter in the
jetting environment tagged with a (hash of a) noun
[module actions shop ext-func]. If ++lia is
computed later with the same first four arguments, then the
jet would first look for a cache, and if it finds one, only
compute the diff, either injecting results of Lia import
resolution into a suspended jetting Lia interpreter, or
performing a list of appended actions. Failing to find a cache,
jet of ++lia would do the same thing as ++lia in Hoon:
append the diff to an appropriate field and run the whole
thing.
At the price of having to bother with cache reclamation
and perhaps slightly longer event log replays we get the
possibility of running Wasm runtime almost full speed,
without having to de/serialize nouns to structs and vice versa
or to copy the state of the Wasm module for every interaction
with it. In Nock the state of the Wasm module is represented
lazily with the first four parameters of ++lia, while the
actual state on which we perform computations exists as a
cache.
A typical interaction with ++lia would look like
this:
++lia for the first time, with an empty diff.
Lia returns one of:
%0;
%1; or
%2, which is resolved outside of Lia.The resolution result is placed into diff, and ++lia is called
again. Next time that same result must be placed directly to
shop to get the right cache and avoid recalculating from
scratch.
If the result is success, new actions can be put in diff and
++lia can be called again to continue interacting with the
module. After that these new actions must be placed directly
to actions on subsequent calls of ++lia to get the right
cache.
As for the cache reclamation, ++lia could include another
input parameter hint ignored in Hoon code, that would serve
as a hint to the jet on how to handle the cache, e.g. for how
long to keep it in the memory. Dojo generators and Gall
agents, for example, would likely benefit from different cache
reclamation strategies.
What is the roadmap forward for the urwasm project? The
first priority is to add unit tests and module validation in
Hoon. This will allow us to verify the correctness of the
interpreter and to ensure that the jetting process is successful.
The next stage will consist of enabling caching in the jet of
++lia and adding a parser from text to (list action).
This will enable us to construct a Lia interpreter in Hoon,
jetted with the Lia interpreter in C/Rust. This facilitates a
default Gall agent interface to interact with Lia and enable
building Gall apps in conventional languages. Finally, we will
add Wasi support and Lia generation to common Wasm
compilers in the same way they generate JS wrappers for the
modules.
This paper presents a novel method of modeling state
machines in Nock and jetting the associated modeling
algorithm. In this method the state is represented implicitly
through a list of actions performed on the initialized state of
the machine, and the state of the jetting emulator of the state
machine is kept as a cache identified with the list of actions.
This gives the interpreter full computational speed due to lack
of overhead caused by translating the state from noun
representation to the jetting representation and back and by
the fact that the jetting function is free to edit the state in
place, as long as it updates the naming tag of the cache.
![]()
~bithex-topnym, Rikard Hjort (2023) “KNock: Nock Semantics in K”. url: https://github.com/runtimeverification/knock (visited on ~2024.3.7).
~dozreg-toplud, K. Afonin et al. (2023) “UWasm (sic) presentation ~dozreg-toplud”. url: https://www.youtube.com/watch?v=h5V_gX33RiM (visited on ~2024.3.7).
~lagrev-nocfep, N. E. Davis (2024). “The Desert of the Reals: Floating-Point Arithmetic on Deterministic Systems.” In: Urbit Systems Technical Journal 1.1, pp. 93–131.
Rossberg, Andreas and the WebAssembly Working Group (2024). WebAssembly Core Specification (W3C Working Draft). Specification. World Wide Web Consortium (W3C).
~sorreg-namtyv, Curtis Yarvin (2010) “Urbit: functional programming from scratch”. url: http://moronlab.blogspot.com/2010/01/urbit-functional-programming-from.html (visited on ~2024.1.25).
— (2013) “Nock 4K”. url: https://docs.urbit.org/language/nock/reference/definition (visited on ~2024.2.20).
~sorreg-namtyv, Curtis Yarvin et al. (2016). Urbit: A Solid-State Interpreter. Whitepaper. Tlon Corporation.
1Cf. ~lagrev-nocfep (2024), pp. 93–131 in this issue.